In the previous Skysurfer models, the calibration of Ardupilot was done with a Pitot tube. However, for this Skysurfer model, there was no Pitot tube.
The process of installing the Ardupilot firmware for Skysurfer is similar to installing it into the Aerojet Model. The Basic Drone Technology and Drone Engineering module was followed in installing the software. In comparison to installing the Ardupilot software into the Aerojet, the position of the Arducopter was changed. This time, the position is upside down. Hence the orientation was changed in the Mission Planner.
First, the components and conditions of Skysurfer were checked. Cellophane tape was used to repair little damage and ensure the good appearance of the model. Telemetry was also added.
The process of installing the Ardupilot firmware for Skysurfer is similar to installing it into the Aerojet Model. The Basic Drone Technology and Drone Engineering module was followed in installing the software. In comparison to installing the Ardupilot software into the Aerojet, the position of the Arducopter was changed. This time, the position is upside down. Hence the orientation was changed in the Mission Planner.
First, the components and conditions of Skysurfer were checked. Cellophane tape was used to repair little damage and ensure the good appearance of the model. Telemetry was also added.
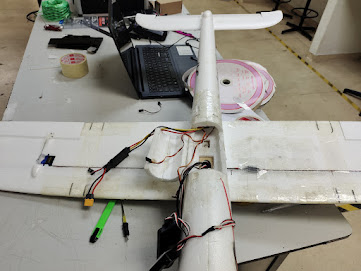
The components were then added, and calibration was done. There was a problem with the aileron, and elevator not being responsive, hence, tuning was done mechanically.
Note :
Note :
1. Ailerons - Output 1
2. Rudder - Output 2
3. ESC - Output 3
2. Rudder - Output 2
3. ESC - Output 3
3. Elevator - Output 4
Below is the circuit diagram for the system
Below is the circuit diagram for the system

Below is the configuration of the GPS module


After, ensuring all calibrations were done, the center of gravity was checked. A rule of thumb is that the center of gravity is located, on the spar of the wing or at the thickest airfoil. The compass was recalibrated again. The GPS was ensured that it was functioning. And the maiden test was done.
It was a successful maiden, however, an issue was encountered in which the telemetry couldn't function while the Skysurfer is flying.
When researched, below is the possible reason for losing signal
1. Lose wire.
Solution: Ensure a secured connection of the wire
Action: No issues
2. Hardware
Solution: Replace hardware with new hardware, and review antenna placement
Action: Review antenna placement
When researched, below is the possible reason for losing signal
1. Lose wire.
Solution: Ensure a secured connection of the wire
Action: No issues
2. Hardware
Solution: Replace hardware with new hardware, and review antenna placement
Action: Review antenna placement
3. Voltage at the receiver
Solution: Make an extension that can be connected to a multimeter. Check the actual voltage the receiver is getting under flight loads and manually move a control surface. A reboot will be induced to verify the problem
4. Low telemetry range
Solution: Increase telemetry range in Mission Planner
5. Analyse data from Mission Planner
(Procedure Link: https://ardupilot.org/copter/docs/common-3dr-radio-advanced-configuration-and-technical-information.html )
Data interpretation
Solution: Make an extension that can be connected to a multimeter. Check the actual voltage the receiver is getting under flight loads and manually move a control surface. A reboot will be induced to verify the problem
4. Low telemetry range
Solution: Increase telemetry range in Mission Planner
5. Analyse data from Mission Planner
(Procedure Link: https://ardupilot.org/copter/docs/common-3dr-radio-advanced-configuration-and-technical-information.html )
Data interpretation

Successful maiden flight!
Thanking Encik Zihad for guiding me in this journey as I gained a lot of knowledge.


Thanking Encik Zihad for guiding me in this journey as I gained a lot of knowledge.

Day 2 (17/8/2023): Auto take-off mode
The Auto take-off mode was configured.
This means, that Flight Mode 1, which was Manual, is switched to Auto.
The Auto Mode will start to function when the Mode is kept at Mode 1, and then the aircraft is shaken at 5 m/s. This will start the throttle.
On the Remote Control, the throttle is set to 50%.
The loiter radius is set to 60 metres

The Auto take-off mode was configured.
This means, that Flight Mode 1, which was Manual, is switched to Auto.
The Auto Mode will start to function when the Mode is kept at Mode 1, and then the aircraft is shaken at 5 m/s. This will start the throttle.
On the Remote Control, the throttle is set to 50%.
The loiter radius is set to 60 metres

Day 3 (18/8/2023): Setting the Take-off angle and Radio Fail Safe.
Take off angle : The take-off angle is set to 30 degrees, This means during take-off the aircraft must be tilted at 30 degrees
Radio Fail Safe: Radio Fail Safe, is a mode at which, when the receiver loses signal from the remote control, the Radio Fail Safe will perform its action so that it is returned without losing the aircraft.
In the scenario implemented, as soon as the aircraft loses signal, the aircraft will automatically, perform a circle and return back to the place at which it was launched (RTL)
Configuring the Fail Safe Mode on the Remote Control
The following steps were taken in configuring the Fail Safe Mode







Configuring the Fail Safe Mode on Mission Planner
1. FS_SHORT_TIMEOUT is set to 1.5 s
If theres no signal in 1.5 s the aircraft fly in a circle ( FS_SHORT_ACTN = 0)
2. FS_LONG_TIMEOUT is set to 5s
If theres no signal after 5 s from lost signal, the aircraft RTL ( FS_LONG_ACTN=1)

The ALT_HOLD_RTL is set to 5000cm = 50m. This means, when aircraft lose signal for example at 20m, this function will make it increase its altitude to 50m before RTL. If the aircraft is at 70m, nothing happens, but the aircraft will RTL

Flight test will be done on Monday (21/8/2023)
Day 4 (21/8/2023): Flight test Day
The flight test went smoothly. Ground checks were done. The centre of gravity was checked.
The flight test went smoothly. Ground checks were done. The centre of gravity was checked.
However, due to insufficient battery, the aircraft lost signal and couldn't recover from flight.
The figure below shows the final location of the aircraft
The figure below shows the final location of the aircraft



The figure below shows the final condition of aircraft. Notice that there were only little crack at the nose.

The figure below shows the final status of the aircraft from Mission Planner.

The figure below shows the data(logs) obtained from Mission Planner


Key takeaway
1. Make sure aircraft is always in sight
Another way to analyze the flight data is to upload the log from the Mission Planner to UAV Log Viewer

1. Make sure aircraft is always in sight
2. Obey battery setting. If power low, RTL
Thanking Encik Zihad, for guiding me in this process. It was a good experience as it was my first time flying the SkySurfer , and doing it with Encik Zihad , as my flight instructor, made it a great experience.
Thanking Encik Zihad, for guiding me in this process. It was a good experience as it was my first time flying the SkySurfer , and doing it with Encik Zihad , as my flight instructor, made it a great experience.
Day 5 (22/8/2023) - Post Flight Test
As the flight test happened, the motor couldn't work. It was found that the ESC was faulty, due to the behavior exhibited by the motor. The ESC was then changed. A disassembly of Skysurfer was done to fit in the new ESC.
As the flight test happened, the motor couldn't work. It was found that the ESC was faulty, due to the behavior exhibited by the motor. The ESC was then changed. A disassembly of Skysurfer was done to fit in the new ESC.
The figure shows the disassembly process




After soldering and testing, the ESC with other components, assembly of Skysurfer was done.
The figure below shows the full assembly of Skysurfer.
The figure below shows the full assembly of Skysurfer.

The flight test was then done.
It was a successful flight test with no complication


Keep learning!
ReplyDeleteSurely ! Thank you encik
Delete